





ผลิตภัณฑ์ทั้งหมด
-
อินเวอร์เตอร์ปั๊มพลังงานแสงอาทิตย์แบบเฟสเดียว
-
อินเวอร์เตอร์ปั๊มพลังงานแสงอาทิตย์ 3 เฟส
-
MPPT VFD อินเวอร์เตอร์ปั๊มพลังงานแสงอาทิตย์
-
ตัวควบคุมปั๊มน้ำพลังงานแสงอาทิตย์
-
ไดรฟ์ความถี่ตัวแปร VFD
-
อินเวอร์เตอร์ความถี่ตัวแปร
-
PMSM อินเวอร์เตอร์
-
อินพุทอินพุท 220v เอาท์พุท 380v
-
มอเตอร์สตาร์ทซอฟต์สตาร์ท
-
เครื่องปฏิกรณ์อินเวอร์เตอร์
-
ตัวต้านทานเบรก VFD
-
ตัวกรอง VFD
-
 Tayfun จากตุรกีอินเวอร์เตอร์ปั๊มพลังงานแสงอาทิตย์ Veikong มีคุณภาพดีมากและเรายังเตรียมผลิตภัณฑ์ส่งเสริมการขายสำหรับนิทรรศการอีกด้วย เราจะทำการสั่งซื้อใหม่เร็ว ๆ นี้ ปีที่แล้วมีเอเย่นต์ในท้องที่เพียงแห่งเดียว และปีนี้มีมากกว่า 8 แห่ง บางตัวขายแต่เวกองเท่านั้น!
Tayfun จากตุรกีอินเวอร์เตอร์ปั๊มพลังงานแสงอาทิตย์ Veikong มีคุณภาพดีมากและเรายังเตรียมผลิตภัณฑ์ส่งเสริมการขายสำหรับนิทรรศการอีกด้วย เราจะทำการสั่งซื้อใหม่เร็ว ๆ นี้ ปีที่แล้วมีเอเย่นต์ในท้องที่เพียงแห่งเดียว และปีนี้มีมากกว่า 8 แห่ง บางตัวขายแต่เวกองเท่านั้น! -
Cristian จากชิลีมันดีมาก! ตัวเลือก LCD ทำให้ใช้งานง่ายขึ้นมาก นั่นคือจุดแข็ง ใช้งานง่าย และแข็งแรง ซอฟต์แวร์พีซีที่ยอดเยี่ยม
-
Brahim assad จากซีเรียความถี่เอาต์พุต VEIKONG VFD500 มีเสถียรภาพเมื่อความถี่อื่นผันผวน กระแสไฟขาออกยังน้อยกว่ารุ่นอื่นๆ ด้วยเหตุนี้ความถี่เอาต์พุตจึงสูงขึ้นด้วย ซึ่งสามารถประหยัดพลังงานได้มากกว่า
ชื่อผู้ติดต่อ :
Terry
หมายเลขโทรศัพท์ :
008613923736332
WhatsApp :
+8613923736332
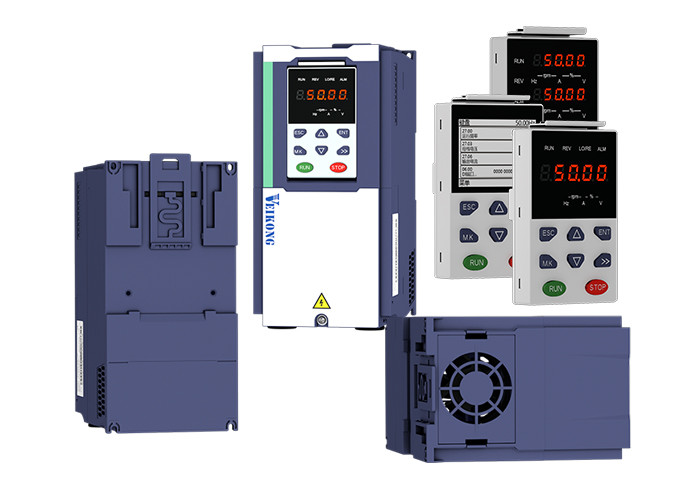
380v 4kw 5hp อินเวอร์เตอร์ควบคุมเวกเตอร์ความถี่ตัวแปร VFD



| สถานที่กำเนิด | จีน |
|---|---|
| ชื่อแบรนด์ | VEIKONG |
| ได้รับการรับรอง | CE, ROHS |
| หมายเลขรุ่น | VFD500-4R0GT4B |
| จำนวนสั่งซื้อขั้นต่ำ | 1 |
| ราคา | Please contact quotation |
| รายละเอียดการบรรจุ | <45kw อินเวอร์เตอร์ใช้แพคเกจกล่อง ≥45kw ใช้แพคเกจกรณีไม้ |
| เวลาการส่งมอบ | ขึ้นอยู่กับปริมาณ |
| เงื่อนไขการชำระเงิน | T/T, เวสเทิร์นยูเนี่ยน, L/C |
| สามารถในการผลิต | 1,000 หน่วยต่อสัปดาห์ |
รายละเอียดสินค้า
| แรงดันไฟฟ้า | 380v/220v | พลัง | 4.4kw |
|---|---|---|---|
| โหมดควบคุม | การควบคุม V/f, การควบคุมเวกเตอร์ | ระดับการป้องกัน | IP20/ IP65 |
| น้ำหนักรวม | 2.1กก. | ปริมาณ | 0.28M*0.15M*0.22M |
| แสงสูง | ไดรฟ์ความถี่ตัวแปร 380v 5hp,อินเวอร์เตอร์ควบคุมเวกเตอร์ 4kw,การควบคุมเวกเตอร์ 5hp ไดรฟ์ความถี่ตัวแปร |
||
รายละเอียดสินค้า
380v 4kw 5hp อินเวอร์เตอร์ควบคุมเวกเตอร์ไดรฟ์ความถี่ตัวแปร VFD
คุณสมบัติ VFD500 และเอกสารข้อมูลทางเทคนิค:
1, ด้วยตัวกรอง EMC C3 ภายในและการออกแบบตัวต่อสำหรับการ์ดขยาย IO และการ์ด PG ประเภทต่างๆ
2 ประสิทธิภาพสูงสุดในอุตสาหกรรมของเราซึ่งมีแรงบิดน้อยกว่า 1hz 0.5hz 0.25hz 0.1hz และ 0hz
มันสามารถเปรียบเทียบกับแบรนด์จีนในประเทศใด ๆ สำหรับแรงบิดเอาต์พุต
3, การทำงานที่ราบรื่นและความเสถียร, รองรับปุ่มกด LCD เสริมและ จอแสดงผลคู่ปุ่มกดสนับสนุนเครื่องมือพีซี
4, รองรับ modbus485, canopen, การสื่อสารแบบ profinet
5, เสียงรบกวนต่ำบนมอเตอร์และการตอบสนองที่รวดเร็วสำหรับการเร่งความเร็วและลดความเร็ว 0.1S โดยไม่มีโซนตาย
6, ย้อนกลับและส่งต่อการสลับฟรี
7, ฟังก์ชั่นการนอนหลับและฟังก์ชั่นประหยัดพลังงานตลอดจนการเขียนโปรแกรม PLC ในตัว
8, การควบคุมความตึงเครียดและการควบคุมโหมดแรงบิด
9, รองรับพารามิเตอร์มอเตอร์สองกลุ่มซึ่งสามารถรับรู้การควบคุมการสลับมอเตอร์สองตัว
| รายการ | Specifiation | |
| ป้อนข้อมูล | แรงดันไฟฟ้าขาเข้า |
1 เฟส/3 เฟส 220V:200V~240V |
| ช่วงความผันผวนของแรงดันไฟฟ้าที่อนุญาต | -15%~10% | |
| ความถี่อินพุต | 50Hz / 60Hz ความผันผวนน้อยกว่า 5% | |
| เอาท์พุต | แรงดันขาออก | 3เฟส:0~แรงดันอินพุต |
| ความจุเกิน |
การใช้งานทั่วไป: 60S สำหรับ 150% ของกระแสไฟที่กำหนด |
|
| ควบคุม | โหมดควบคุม |
การควบคุม V/f |
| โหมดการทำงาน | การควบคุมความเร็ว, การควบคุมแรงบิด (SVC และ VC) | |
| ช่วงความเร็ว |
1:100 (V/f) |
|
| ความแม่นยำในการควบคุมความเร็ว |
±0.5% (วี/f) |
|
| ตอบสนองความเร็ว |
5Hz(V/f) |
|
| ช่วงความถี่ |
0.00~600.00Hz(วี/f) |
|
| ความละเอียดความถี่อินพุต |
การตั้งค่าดิจิตอล: 0.01 Hz |
|
| แรงบิดเริ่มต้น |
150%/0.5Hz(วี/f) |
|
| ความแม่นยำในการควบคุมแรงบิด |
SVC: ภายใน 5Hz10% สูงกว่า 5Hz5% |
|
| เส้นโค้ง V/f |
ประเภทเส้นโค้ง V / f: เส้นตรง, หลายจุด, ฟังก์ชันกำลัง, การแยก V / f; |
|
| ความถี่ให้ทางลาด |
รองรับการเร่งความเร็วและการชะลอตัวของเส้นตรงและ S |
|
| การควบคุมแรงดันไฟฟ้าบัส DC |
การควบคุมแผงแรงดันไฟฟ้าเกิน: จำกัดการผลิตไฟฟ้าของมอเตอร์โดยการปรับความถี่เอาต์พุตเพื่อหลีกเลี่ยงการข้ามข้อผิดพลาดของแรงดันไฟฟ้า |
|
| ความถี่ของผู้ให้บริการ | 1kHz~12kHz(แตกต่างกันไปตามประเภท) | |
| วิธีการเริ่มต้น |
สตาร์ทโดยตรง (สามารถซ้อนเบรก DC ได้);เริ่มต้นการติดตามความเร็ว |
|
แทนที่ vfd แบรนด์ดังในแอปพลิเคชันทั่วไป
![]()
ฟังก์ชั่นการนอนหลับ
| 41 ฟังก์ชั่นการนอนแบบกลุ่ม | ||||
| P41.00 | โหมดสลีปและการเลือกปลุก |
หลักหน่วย: การเลือกโหมดสลีป
|
010 | ☆ |
| P41.01 | ค่าการตั้งค่าสลีปตามความถี่ | 0.00Hz ~ 600HZ มันจะหลับถ้าค่าน้อยกว่าค่านี้ | 0.00Hz | ☆ |
| P41.02 | ปลุกเกณฑ์ตามความถี่ | 0.00hz~600.00hz, ,มันจะปลุกถ้าค่ามากกว่าค่านี้ |
0.00Hz |
☆ |
|
เมื่อเลือกความถี่สลีปและการปลุกความถี่ จะต้องตั้งค่าโดย P41.01 < P41.02เมื่อความถี่ |
||||
| P41.03 | ค่าการตั้งค่าการนอนหลับโดยความดัน | 0~100.0% | 0.0% | ☆ |
| P41.04 | ปลุกเกณฑ์ด้วยแรงกดดัน | 0.~100.0% | 0.0% | ☆ |
| P41.05 | เวลาหน่วงเวลานอน | 0.0s~6000.0s | 0.0s | ☆ |
| P41.06 | ตื่นสายๆ | 0.0s~6000.0s | 0.0s | ☆ |
| P41.07 | เวลาชะลอการนอนหลับ |
การตั้งค่าตัดสินใจโดย P03.16 |
0.00s | ☆ |
แนะนำผลิตภัณฑ์
